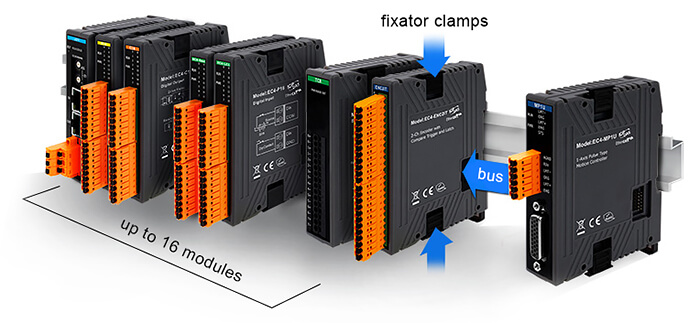
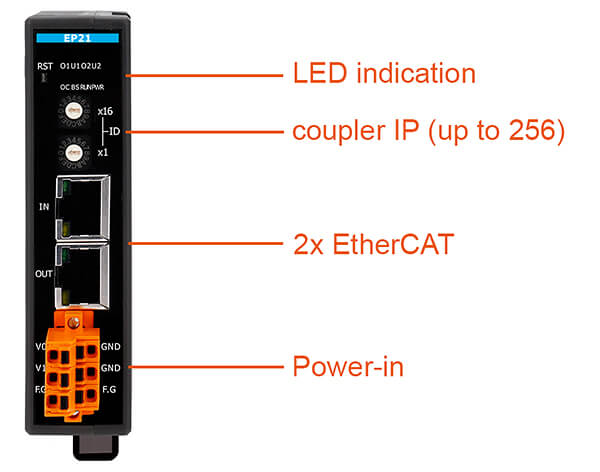
The new line of EC4 devices for EtherCAT-based distributed I/O is a family of compact solutions that consist of a communication module EC4-EP21 and connected I/O modules. These modules have a narrow-profile form factor, which allows you to save space in the cabinet. Until recently, the ICP DAS nomenclature included remote input-output modules made in a separate case (ECAT-2000 series, EC1 (available soon), EC2), the new EC4 line allows you to assemble a flexible system from the required set of analog, digital and other channels. Input/output modules are installed on a high-speed local bus, up to 12 IO modules can be connected to one coupler at the same time.
Design and interfaces
EC4 modules have a narrow form factor (width starts at 17.5 mm) and are designed for installation on a DIN rail. The main connection is via the EtherCAT bus using RJ-45 connectors. All standard EtherCAT synchronization modes are supported (Free Run, SM, DC), and the exchange cycle time reaches 100 µs.
I/O modules
At the time of writing this article, ICP DAS has announced 18 I/O modules (analog, digital, EtherCAT splitter, for weight measurement sensors, for connecting temperature sensors, motors, encoders). The modules have different types of synchronization via the EtherCAT bus, as they are intended for different applications and have different levels of requirements for accuracy and performance..
- Some modules (especially simple digital I/O, relays) do not require high synchronization and can operate in Free Run (asynchronous mode). In this mode, devices operate without strict synchronization. Each device performs its tasks independently of others, without being tied to a common time source.
- Other, more complex modules (such as analog or fast counters) support SM (Synchronized Mode) for cyclic synchronization. Devices are synchronized via cyclic messages (SYNC) sent by the coupler. All slave devices synchronize their processes using these signals.
- Devices with DC (Distributed Clocks) have a built-in high-precision clock and are used in systems where synchronization is critical (for example, servo control). This is the most accurate synchronization mode in EtherCAT. The coupler is selected as the main time source, and the modules adjust their local clocks to it. Correction of time shifts occurs automatically. Nanosecond synchronization accuracy.
|
Module type |
Synchronization |
|
|
Digital Input/Output |
|
|
|
16 DO open collector type (sink), 500mA per channel |
Free Run |
|
|
EC4-A16 |
16 DO open collector type (source), 500mA per channel |
|
|
16 DI type "dry contact" or "contact with external supply" (30 Vdc) |
||
|
EC4-R8 |
8 electromechanical relays with open contact, 5A 30 Vdc |
|
|
EC4-P4R4 |
4 electromechanical relays with open contact, 5A 30 Vdc + 4 DI (dry, wet contact) |
|
|
Analog input |
|
|
|
8 AI, 16-bit ADC, 0~10 V, ±2.5 V, ±5 V, ±10 V, sampling rate 1 kHz per channel |
Free Run |
|
|
EC4-AD8H |
8 AI, 16-bit ADC, 0~10 V, ±2.5 V, ±5 V, ±10 V, sampling rate 10 kHz per channel |
|
|
EC4-AD8R |
8 AI, 16-bit ADC, 0~10 V, ±2.5 V, ±5 V, ±10 V, sampling rate 1 kHz per channel, with isolation |
|
|
Analog output |
| /
|
|
4 AO, 12-bit, ±5 V, ±10 V, 0~5V, 0~10V, 0~10 mA, 0~20 mA |
Free Run |
|
|
EC4-DA4H |
4 AO, 16-bit, ±5 V, ±10 V, 0~5V, 0~10V, 0~20 mA, 4~20 mA |
|
|
Strain gauge sensors |
|
|
|
1 channel, 24-bit, 1 kHz sampling per channel, ±10 V, ±5 V, ±2.5 V, ±1.25 V, ±625 mV, ±312 mV, ±200 mV, ±100 mV, ±50 mV, ±25 mV, full bridge connection |
Free |
|
|
Temperature measurements |
|
|
|
8 channels for connecting thermocouples: J, K, T, E, R, S, B, N, C, L, M, LDIN4371, 16-bit, 100 Hz per channel |
Free Run |
|
|
8 channels for connecting thermistors: Pt100, Pt1000, Ni120, 16-bit, 100 Hz per channel |
||
|
Connecting motors, drives |
|
|
|
EC4-MS1 |
1 axis, stepper motor control, CiA402 |
Free Run |
|
EC4-MP1U |
1 axis, pulse output, CiA402 |
|
|
Connecting encoders, counters |
|
|
|
2 inputs for encoders, 2x DO, 32-bit, frequency 4 MHz, counter type: CW/CCW, Pulse/Direction, A/B |
Free Run |
|
|
EC4-ENC2A |
Absolute counter, 2 BiSS-C/SSI inputs, 48-bit, 10MHz |
|
|
EC4-ENC4A |
Absolute counter, 4 inputs BiSS-C/SSI, 48-bit, 10MHz |
|
|
EtherCAT expansion modules |
|
|
|
2 EtherCAT outputs to add star or branch topology to the chain |
Free Run |
|
The EC4-based solution is ideal for systems with increased requirements for mounting density: multi-axis synchronization, monitoring of environmental parameters (temperature, currents, deformation), stepper motor control, as well as flexible I/O construction based on EtherCAT. ICP DAS also has other solutions for remote management and I/O collection.

