Robotics is one of the clearest expressions of the Industry 4.0 vision — digital control, intelligent sensing, real-time communication, and physical manipulation converging in a single automated system. Yet despite decades of advancement, industrial robot development has historically been constrained by proprietary architectures: closed hardware platforms, vendor-locked protocols, and rigid control software that limited what engineers could build, integrate, and extend. NEXCOM's Robot Control Solution, built on the open NexROBO platform and EtherCAT fieldbus technology, fundamentally changes this equation — giving system integrators and machine builders the freedom to design, configure, and expand robotic systems without specification lockdown.
Why Industrial Robotics Needs an Open Architecture
Industrial robotic systems — regardless of their physical form — share a common set of subsystems: a robot body built for harsh environments, a controller responsible for sensing, motor driving, and movement algorithms, and a communications layer connecting all components. Traditionally, each of these layers has been supplied and locked by a single robot manufacturer, forcing system integrators to work entirely within that vendor's ecosystem.
This approach creates significant practical problems. When a production line requires robots from different vendors, integrating them with a common control layer becomes a major engineering effort. Adding new capabilities — such as machine vision, conveying systems, or remote I/O — often requires purchasing additional proprietary hardware. And when a particular component is discontinued or a new generation of sensors or drives becomes available, migrating to it may require rebuilding the control architecture from scratch.
NEXCOM's response to this is the NexROBO platform: an open, modular, EtherCAT-based robotic control solution that breaks robot systems into discrete, interchangeable modules — giving engineers the freedom to select the specific combination of hardware and software that best fits their application.
The Complete Architecture of a Robotic Production Line
A complete robotic production line encompasses far more than the robot itself. NEXCOM's solution addresses the full system architecture, covering every component from the robot body and controller to the supporting systems that complete the production line:
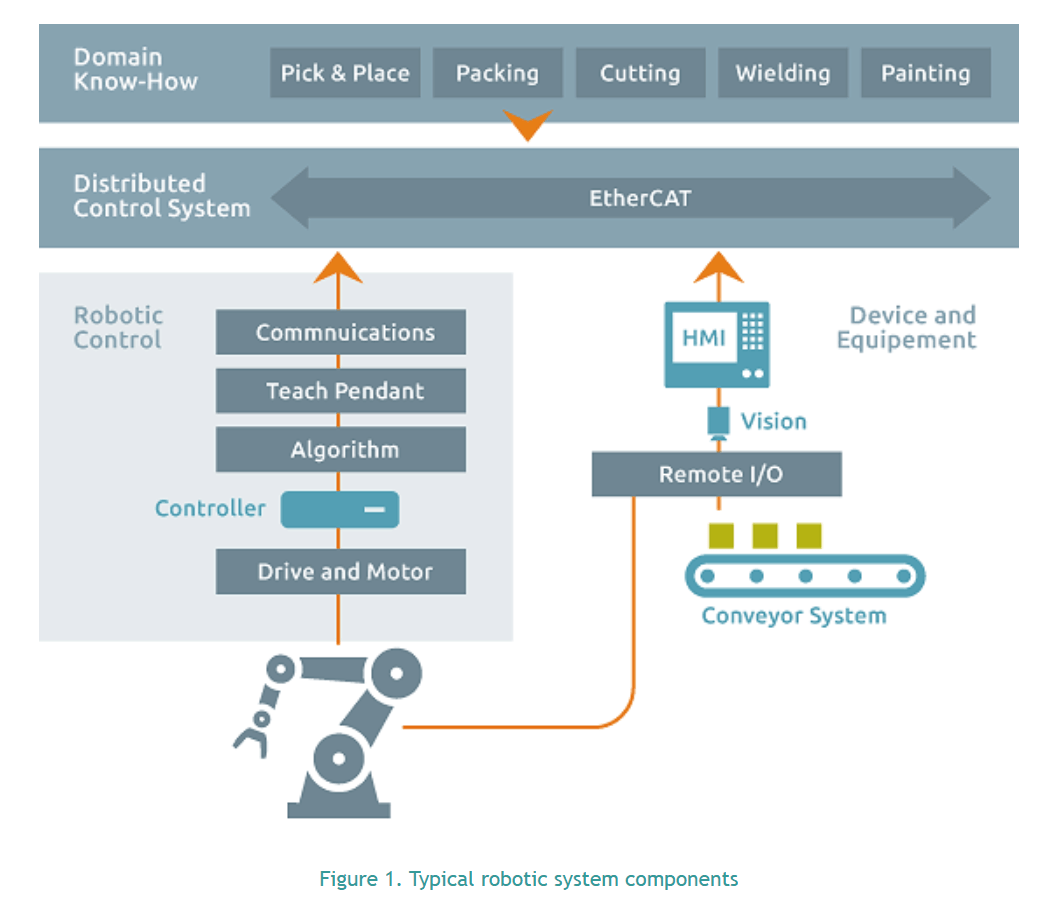
Robot Body
High-strength materials, designed for harsh environments. Performs welding, painting, packaging, inspection, and other manufacturing tasks.
Robot Controller
PC-based control system handling sensing, motor driving, movement algorithms, remote teaching, and network communication via EtherCAT.
Communications
EtherCAT fieldbus providing deterministic, high-speed data exchange between the controller, drives, I/O, and all distributed subsystems.
Remote I/O
EtherCAT-based peripheral modules communicating with sensors, actuators, and industrial networks across the factory floor.
Vision Inspection
Industrial cameras for pattern checking, barcode scanning, defect detection, and measurement — integrated directly into the robot control loop.
HMI
Panel PCs enabling operators to interact with production equipment, visualize robot status, and adjust parameters in real time.
Teach Pendant
Handheld device for direct robot programming and movement teaching on the factory floor, compatible with the NexROBO control stack.
Conveying System
Equipment for moving goods along the production line, coordinated by the same EtherCAT control network as the robotic subsystems.
NexROBO: The Open Modular Robot Control Platform
NexROBO is NEXCOM's pre-integrated, pre-validated robotic control solution. Rather than delivering a monolithic, closed robot system, NexROBO breaks the robot architecture into discrete, validated hardware and software modules. System integrators and robotics engineers can select from a broad portfolio of NEXCOM EtherCAT Master controllers, robot arms, servo drives, motors, I/O modules, industrial cameras, and teach pendants — choosing the combination that best meets their application's requirements, not the combination imposed by a single supplier.
The modular design also means that adding new capabilities — an additional camera, an extra axis, a new type of sensor — is a matter of selecting and connecting the appropriate EtherCAT slave module, not redesigning the control architecture. Building, expanding, and reconfiguring NexROBO-based robots is straightforward thanks to the standardized EtherCAT communication layer that binds all components together.
NexECM: The EtherCAT Master Development Stack
At the heart of the NexROBO software ecosystem is NexECM — NEXCOM's EtherCAT Master development stack. NexECM provides pre-validated compatibility and smooth communication between NEXCOM EtherCAT Master controllers and EtherCAT slave modules from different manufacturers, eliminating the time-consuming integration testing that would otherwise be required when mixing components from different vendors.
Critically, NexECM includes pre-written control algorithms and embedded APIs for the three most widely used industrial robot types — significantly reducing the software development effort:
- 6-axis articulated robots — the most common configuration for welding, assembly, material handling, and machine tending.
- SCARA robots — optimized for high-speed pick-and-place operations in electronics assembly and packaging.
- Delta robots (3/4-axis) — designed for extremely fast parallel-kinematic operations in food processing, pharmaceutical packaging, and light assembly.
NexECM supports both C/C++ and IEC 61131-3 programming, giving engineers the flexibility to work in their preferred development environment. Those accustomed to PLC programming can leverage IEC 61131-3 libraries and existing code, while software developers can use C/C++ for custom algorithm implementation. This dual-language support is especially valuable in organizations where different teams — automation engineers and software developers — need to collaborate on the same robotic system.
Supported Robot Types and Applications
| Robot Type | Axes | Typical Applications |
|---|---|---|
| Articulated | 6-axis | Welding, painting, packaging, assembly, machine tending, inspection |
| SCARA | 4-axis | High-speed pick-and-place, electronics assembly, PCB handling |
| Delta | 3/4-axis | Food packaging, pharmaceutical sorting, light-weight high-speed assembly |
| Collaborative (CoBot) | Varies | Human-robot collaboration on assembly lines, quality inspection support |
| Humanoid / Quadruped | Multi-axis | Advanced automation, inspection, logistics — supported by dual EtherCAT Master AI controller platform |
NexROBO Simulator: Develop and Test Without Physical Hardware
One of the most practically valuable tools in the NexROBO ecosystem is the NexROBO Simulator — free downloadable software that simulates the complete operation of a 6-axis articulated robot, including trajectory simulation and movement imitation, without requiring a physical robot arm.
Engineers can connect to six EtherCAT drives and motors to test and verify robot operations in the simulator before committing to physical hardware. This eliminates the cost and risk of using actual robot arms for early-stage algorithm testing and control scheme validation, allowing developers to focus on their application logic and robot programming rather than on motor drive configuration and controller bring-up. Any control application that requires pre-testing can be fully simulated and validated before deployment on the real production system.
EtherCAT: Why It Is the Right Fieldbus for Robotics
EtherCAT (Ethernet for Control Automation Technology) is the IEC-standardized real-time Ethernet protocol that underpins the entire NexROBO architecture. Its selection is not arbitrary — EtherCAT has specific technical properties that make it uniquely suitable for robotic and motion control applications:
- Deterministic timing — EtherCAT's distributed clock architecture synchronizes all control nodes to within sub-microsecond accuracy, enabling precise coordination of multi-axis motion profiles.
- High-speed data exchange — a single EtherCAT frame can service hundreds of nodes in a single bus cycle, achieving cycle times as low as 100 microseconds.
- Simple wiring topology — standard Ethernet cables connect devices in a line, ring, or tree topology without requiring switches or hubs, simplifying factory floor cabling.
- Open standard with broad ecosystem — EtherCAT is an IEC standard (IEC 61158/IEC 61784) with hundreds of certified slave device manufacturers, enabling free selection of drives, I/O, and sensors from any compatible vendor.
- Scalability — adding additional axes, I/O modules, or control nodes to an EtherCAT network requires no changes to the network infrastructure, only the addition of slave devices.
Integration with the Broader Smart Factory
NexROBO-based robotic systems are not isolated units — they are designed to connect with the broader smart factory infrastructure. Through the NEXCOM IoT Automation Solution framework, robotic cells can integrate with MES (Manufacturing Execution Systems), SCADA platforms, cloud analytics, and enterprise ERP systems via standard industrial protocols. NEXCOM's NexAIoT platform and Microsoft Azure IoT Suite integration enable real-time production monitoring, predictive maintenance alerting, and data-driven optimization of robotic processes at the enterprise level.
Machine vision integration is supported natively — cameras connected to the EtherCAT network or directly to the robot controller can feed real-time inspection results into the robot's decision logic, enabling closed-loop quality control without external vision PCs. For the most demanding AI-driven vision workloads, NEXCOM's latest dual EtherCAT Master AI robot controller — built on the NVIDIA Jetson AGX Orin platform — combines real-time motion control with GPU-accelerated AI inference in a single system.
Related NEXCOM Products Available at IPC2U
- NEXCOM ECM-S110A01-X — Intel x86 Motion Controller (EtherCAT)
Fanless EtherCAT robot controller with Intel N97 3.6 GHz, 8 GB DDR5, 128 GB M.2 SSD, HDMI/DP, 3× 2.5GbE LAN, 4× COM, USB 3.2 + 2.0, optional 8-bit GPIO, Mini-PCIe (mSATA/Wi-Fi/LTE), 9–30 VDC input. Ships with Ubuntu 22.04 + NexRTOS real-time OS. - NEXCOM NIFE-200 — Industrial Fieldbus Embedded Computer
Intel Celeron J1900, up to 8 GB DDR3L, 2× GbE LAN, 2× Mini-PCIe for EtherCAT / PROFIBUS / PROFINET / CANopen / DeviceNET modules, 24V DC input, -10°C to +60°C. Base controller platform for CODESYS SoftMotion and NexROBO applications. - NEXCOM SoftMotion Starter Kit
Ready-to-use tutorial package including NIFE-200 controller, CODESYS software, EtherCAT coupler, 8-channel DI module, 8-channel DO module, power supply, and Quick Start Guide. Ideal for hands-on evaluation of EtherCAT SoftMotion control in robot and machine automation projects. - NEXCOM MiniBOT Robot Package
Entry-level 6-axis articulated robot educational package with EtherCAT communication, open robot controller (Intel Celeron J1900), Visual C/C++ API, 500 GB HDD, DP + DVI-I display outputs. Suitable for R&D, education, and prototype robot development. - NEXCOM NexROBO SCARA Edu Package — SCARA Robot Solution
EtherCAT-based SCARA robot educational and development package for high-speed pick-and-place and assembly applications. Open robot controller with NexROBO software, pre-validated EtherCAT communication, and C/C++ API support for custom robot application development. - NEXCOM NEIO-1812 — Industrial EtherCAT Digital I/O Module
EtherCAT slave module with 16× digital inputs and 16× digital outputs, IP20, 2× 100BASE-TX, 24 VDC input, -5°C to +60°C. Used as a distributed I/O node in NexROBO robotic production line architectures. - NEXCOM IoT Automation Solutions at IPC2U
Full overview of NEXCOM's IoT automation and robot control ecosystem — NIFE controllers, EtherCAT I/O modules, panel PCs, IoT gateways, and integration with SCADA/MES/cloud platforms. Pre-sales consultation and project support available. - NEXCOM — Official IPC2U Partner Page
IPC2U has cooperated with NEXCOM for over 25 years. Full portfolio, pre-sales consulting, OEM/ODM customization support, lifecycle management, and fast European delivery.
Summary
NEXCOM's Robot Control Solution — centred on the NexROBO platform, NexECM development stack, and EtherCAT fieldbus — provides system integrators and machine builders with a genuinely open, modular foundation for industrial robotics. By breaking robot systems into pre-validated, interchangeable hardware and software modules, it eliminates specification lockdown, reduces integration effort, and allows development teams to focus on their application logic rather than on low-level controller and communication bring-up. Support for 6-axis articulated, SCARA, and delta robot types, combined with dual-language programming (IEC 61131-3 and C/C++), machine vision integration, and a free simulator tool, makes it one of the most complete and accessible open robotics platforms available for Industry 4.0 deployments.
IPC2U offers the full range of NEXCOM robot control and EtherCAT automation products, with over 25 years of partnership experience, pre-sales engineering consultation, and fast European delivery.

