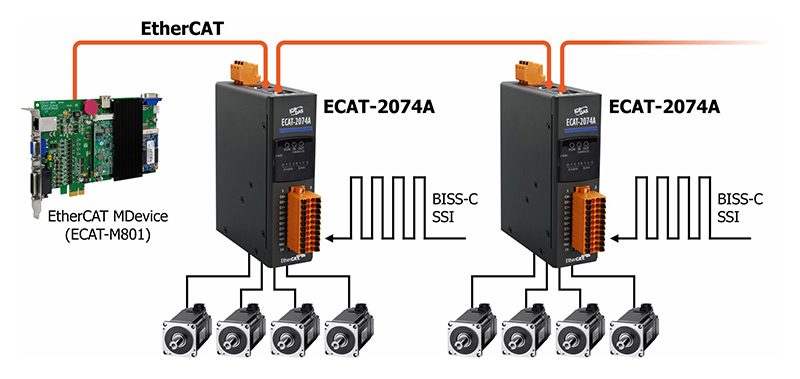
In modern industrial automation, there is a growing need for the most accurate position measurement. Absolute encoders are widely used in robotic systems and precision production lines, as they eliminate the need for re-initialization after power-up. ECAT-2074A was designed specifically to solve these problems, providing accurate and fast data transfer to control devices via the EtherCAT interface, which is especially important when implementing precision positioning tasks.
The ECAT-2074A module is an effective solution for working with absolute encoders in automation systems using the EtherCAT interface. The device supports two common protocols: SSI and BiSS-C, which can operate at frequencies up to 10 MHz. The ECAT-2074A comes with with four independent channels for parallel connection of encoders and is capable of processing up to 48 bits of data, automatically compensating for signal delays due to cable lengths. Various data transmission frequencies and two types of information encoding are available: binary and Gray code.
Advantages of non-volatile memory
An absolute encoder usually has a function to save the original position data after the system power is turned off and restored. However, if the settings of the encoder master device are lost, the user will still need to re-set the parameters. In turn, the ECAT-2074A module has a built-in non-volatile memory that allows you to save user-defined parameters. The built-in non-volatile memory ensures the storage of user parameters and the restoration of settings after power failures.
Features of ECAT-2074A:
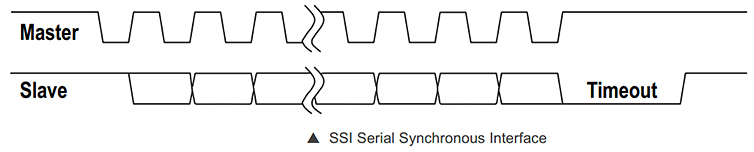
- SSI mode: The Master device periodically sends pulses to the encoder, which transmits data on the pulse edge, and the master reads them on the signal fall. Upon completion of the transmission, the Master holds the signal high, and the encoder is ready for the next transmission after a timeout.
- BiSS-C mode: The Master device sends a periodic pulse, on the second edge of which the encoder responds with an acknowledgement (Ack), then transmits the start bit and position information, including error and warning bits, as well as a CRC checksum. This check code is generated based on the CRC generation polynomial. The Master controller must have this polynomial to check the data. The general CRC generation polynomial is x6 + x1 + x0 (CRC-6). After the transmission is complete, the signal returns to the high state by timeout..
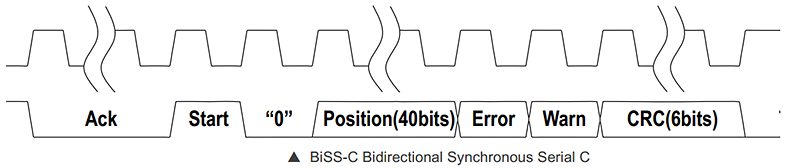
The number of bits transmitted in BiSS-C mode is individually configurable: the maximum number of multi-turn and single-turn bits in total does not exceed 48. It is possible to use only single-turn mode if necessary.
Flexible requency configuration
The ECAT-2074A offers a choice of seven transmission frequencies, ranging from 156.25 kHz to 10 MHz, allowing the module to be tailored to the characteristics of a specific encoder.
|
Frequency ordinal number |
Frequency |
|
0 |
10 MHz |
|
1 |
5 MHz |
|
2 |
2.5 MHz |
|
3 |
1.25 MHz |
|
4 |
625 KHz |
|
5 |
312.5 KHz |
|
6 |
156.25 KHz |
Delay compensation and data accuracy
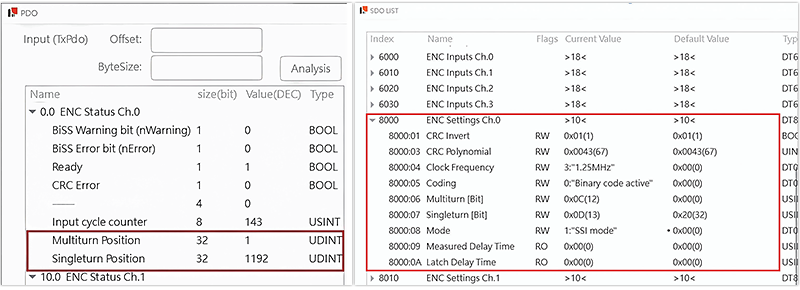
The module also automatically compensates for signal delays: the signal transmitted between the master and the encoder is delayed due to the length of the cable, i.e. the longer the cable, the greater the measured delay value. At high transmission frequencies, this delay can lead to incorrect data readings. The ECAT-2074A measures the delay caused by the cable length and automatically sets the compensation value to ensure correct data reading. Additionally, the ECAT-2074A supports the CANopen over EtherCAT (CoE) protocol, using SDO objects for initialization and configuration, as well as PDO objects for regular transmission of current data on the encoder position.
Integration into automation systems
ICP DAS provides the libecatdevice library (.dll) that enables the use of EtherCAT Master devices under the Windows operating system. The library simplifies the development process and provides powerful functionality for a quick start. The library architecture is illustrated in the following diagram:
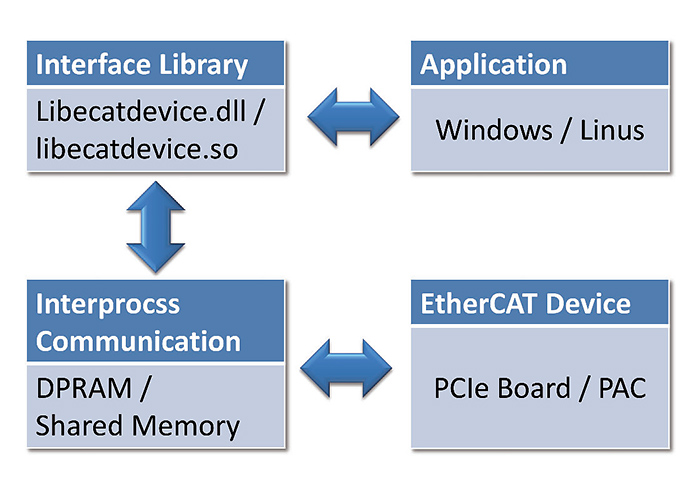
- Interface Library - interacts with the user application on Windows/Linux.
- Interprocss Communication - Provides communication between the interface library and the EtherCAT device (PCIe card or PAC).
The module can be controlled via the EtherCAT bus via modular controllers of the EMP-9000 series, for example, EMP-9658-16, without the head unit of modules - EMP-2848M or via software on a PC via boards with an EtherCAT interface of the ECAT-M800 series.