NexECM and NexRTOS are positioned as a combined control and real-time software platform for advanced automation, spanning robots, machine tools, AMRs, and factory systems. The presentation describes NexECM as an industrial-grade EtherCAT Master solution and NexRTOS as a Linux-based real-time operating system designed for deterministic performance in demanding motion-control environments.
Industrial Positioning
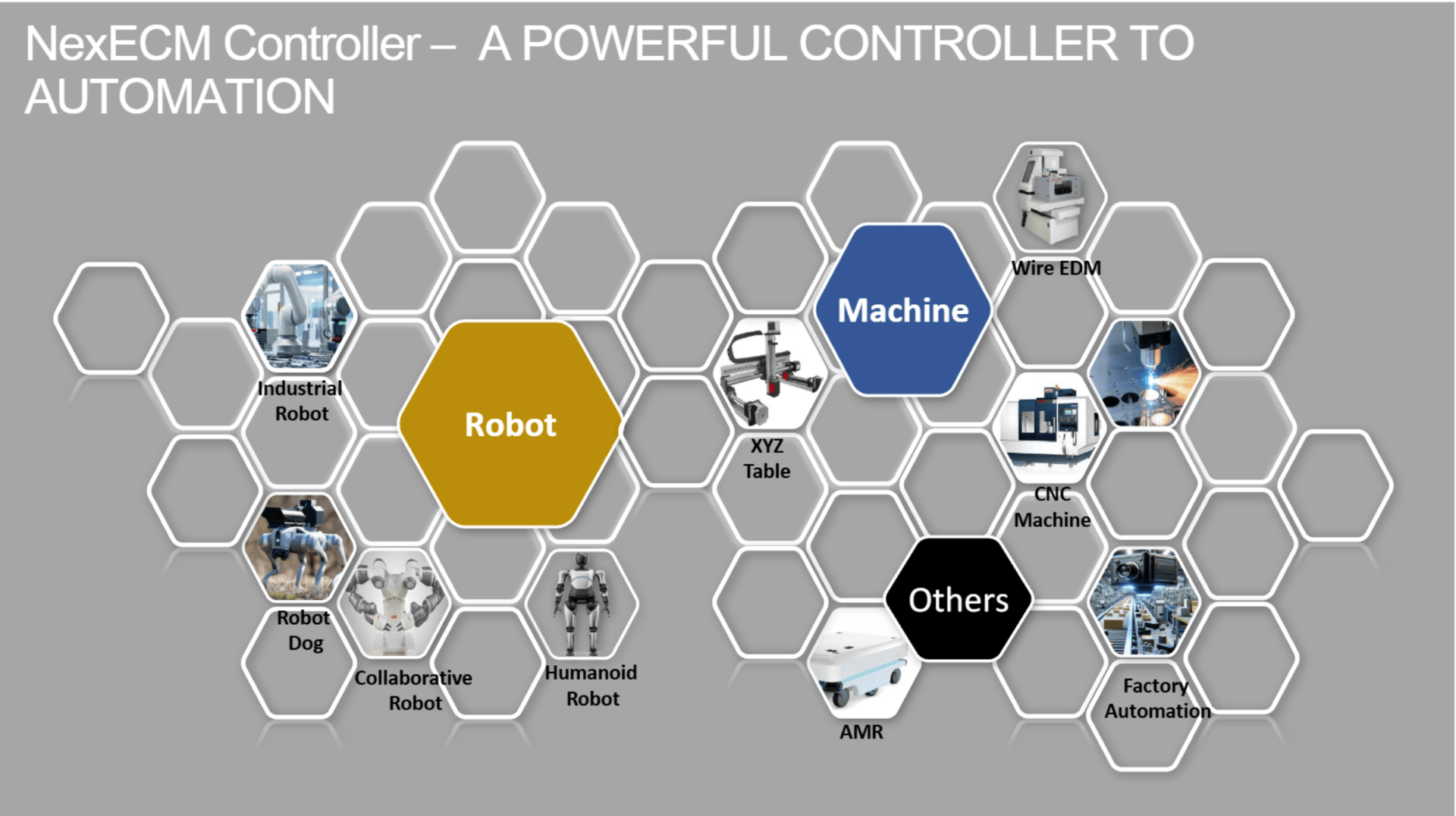
The platform is presented for a broad range of automation scenarios, including industrial robots, robot dogs, collaborative robots, humanoid robots, wire EDM machines, XYZ tables, CNC machines, AMRs, and general factory automation. This breadth matters because modern machine builders increasingly need one control architecture that can scale from conventional servo motion to AI-enabled robotic systems.
In the software stack, NexECM acts as the EtherCAT Master layer while NexRTOS provides the real-time execution environment needed for precise and repeatable control. The presentation also places the solution inside a wider ecosystem that includes AI modules, VSLAM, NVIDIA Jetson platforms, ISAAC ROS, Safety over EtherCAT, EtherCAT actuators, safety joints, robot tools, and NEIO series components.
Core Software Components
NexECM is introduced as a comprehensive EtherCAT Master solution built from three essential elements: a standard-compliant EtherCAT master stack, the ECM Studio configuration environment, and a low-jitter LAN driver. This structure is important from an engineering standpoint because fieldbus performance depends not only on protocol support, but also on tooling efficiency and network determinism under load.
The presentation states that NexECM is fully compliant with the EtherCAT standard and compatible with EtherCAT devices from any vendor. It also highlights practical control capabilities such as support for cycle times as low as 250 microseconds, connection of up to 64 EtherCAT slave devices, cable redundancy, and a high-level API aligned with the CiA 402 motion-control profile.
Real-Time Linux Architecture
NexRTOS is described as an optimized Linux-based real-time OS for automation, supporting Ubuntu or Debian and integrating built-in PREEMPT_RT or Xenomai real-time patches. According to the presentation, the platform is tuned for microsecond-level deterministic behavior, uses multi-CPU isolation, and guarantees real-time jitter below 30 microseconds.
From a system architecture perspective, this approach is valuable because it separates time-critical control tasks from general-purpose functions such as HMI, databases, analytics, web services, video storage, vision, and AI perception services running in Docker containers. The presentation illustrates CPU-core allocation for real-time NexECM applications alongside non-real-time workloads, showing how a single computing platform can consolidate motion, AI, I/O, and application services.
Platform Compatibility
The software architecture supports both x86 and Arm computing platforms, which gives machine builders flexibility when selecting industrial PC or embedded AI hardware. For Windows-based real-time deployments, the presentation lists support for INtime for Windows, RTX64/RTX32, and INtime Distributed RTOS, while NexRTOS support is shown on Ubuntu with PREEMPT_RT and Debian with PREEMPT_RT.
This dual-path strategy is commercially relevant because some OEMs still rely on Windows-based engineering and runtime environments, while newer robotic systems increasingly prefer Linux for containerization, AI frameworks, and edge deployment. In effect, the portfolio is presented as a bridge between conventional industrial automation and next-generation robotic computing.
EtherCAT Interoperability
A major strength of the NexECM proposition is broad slave-device interoperability through ESI and ENI configuration workflows. The presentation lists verified EtherCAT slave device compatibility across Japanese, Taiwanese, Chinese, European, and American brands, including Yaskawa, Panasonic, Omron, Mitsubishi, Delta, Shihlin, TECO, HIWIN, CoolDrive, Inovance, Hanslaser, TC-Drive, DOBOT, Synapticon, Beckhoff, Maxon, Bosch Rexroth, Baumüller, Copley, Kollmorgen, and Servotronix.
For system integrators, this is a major practical advantage because it reduces vendor lock-in and simplifies reuse of established servo, drive, and actuator ecosystems. In projects involving robotics or precision machinery, verified multi-brand compatibility can significantly shorten commissioning time and lower integration risk.

Reliability Validation
The presentation emphasizes performance validation through both software tools and real-world stress testing. NEXCOBOT identifies two proof points in particular: NexRTScope, a dedicated tool for measuring system jitter and generating performance reports, and a 64 EtherCAT slave drive setup used to validate long-term stability under high-load operating conditions.
NexRTScope is described as running under continuous 100 percent CPU usage for 24 hours, and under random 100 percent CPU usage for 24 hours in the NexRTOS case. These test conditions are significant because real industrial reliability depends on deterministic behavior under sustained compute stress, not only under ideal laboratory conditions.
Engineering Workflow with NexECM Studio
The presentation gives strong emphasis to NexECM Studio as the engineering front end for EtherCAT deployment. Its listed functions include topology scanning and identification, offline editing, ESI import, ENI generation, PDO editing, SDO access, compatibility testing with modules from different vendors, CiA 402 support, slave-to-slave communication setup, and visual topology representation.
For engineering teams, these capabilities directly affect project time and commissioning quality. A capable setup tool reduces the friction of initial network discovery, parameter management, servo-profile mapping, and future maintenance activities across multi-axis systems.
Multi-Instance Control
One of the more strategically important platform capabilities is multi-instance support, with up to eight EtherCAT Masters shown in the presentation. The system diagram depicts a centralized control “brain” combining NexRTOS, NexECM, and NVIDIA computing, then distributing control across multiple masters assigned to different robot sections such as feet, arms, and dexterous hands.
This architecture aligns well with complex robotic machines where body segments or subsystems require independent but synchronized real-time control domains. It also suggests a scalable approach for humanoid robots and other distributed mechatronic systems that need both AI processing and deterministic motion execution on the same platform.

Product Portfolio
The presentation makes clear that the hardware products are a critical part of the message, especially the NVIDIA-based MARS series controllers intended for AI-driven real-time automation. These products connect the software platform to deployable industrial hardware, and they should be treated as central commercial offerings rather than peripheral examples.
MARS NX and Nano Series
- ECM M400-N00-02-512-X: Based on NVIDIA Jetson Orin NX, 16 GB memory, 100 TOPS AI performance. Includes 5 RJ45 GbE, 4 USB 3.2 Gen1 Type-A, 1 USB 3.2 Gen2 Type-A, 1 HDMI, 2 RS232, 2 RS232/422/485, and 2 CAN FD interfaces.
- ECM M400-N02-01-512-X: Based on NVIDIA Jetson Orin Nano, 8 GB memory, 67 TOPS AI performance. Same interface set as the NX model.
MARS AGX and Thor Series
- ECM M400-A10-04-C-1T-X: Based on NVIDIA Jetson AGX Orin 64 GB, 275 TOPS AI performance. Includes 4 RJ45 GbE, 8 GMSL, 3 USB 3.2 Gen1 Type-A, 1 USB 3.2 Gen2 Type-C, 1 HDMI, 2 CAN FD, and mixed serial interfaces.
- ECM R400B-A10-04-C-1T-X: Rack-style model with AGX Orin 64 GB and 275 TOPS positioning.
- Thor Generation (ECM M400-T10-05-1T-X / ECM R400B-T10-05-X): Based on NVIDIA Jetson AGX Thor T5000, specified at approximately 1035 TOPS.
- IGX Thor Generation ( ECM M400-T20-05-1T-X / ECM R400B-T20-05-X ): Based on NVIDIA Jetson IGX Thor T5000 with 2,070 TFLOPS (FP4), including a safety module.
Development Support
Beyond hardware and runtime software, the presentation highlights a practical support framework for developers and integrators. Listed resources include online manuals, AE team support, setup environments for INtime and RTX, an EtherCAT Master user manual, a CiA402 servo-control user manual, coaching and consultation, education and training courses, and real-time assistance through Line, WeChat, AnyDesk, Teams, and TeamViewer.
Visual Materials from the Presentation
The presentation includes product and interface visuals that should be retained in any designed article or marketing layout because they support product understanding and solution credibility. Key visuals include brand compatibility graphics, NexRTScope interface and report imagery, NexECM Studio screenshots for topology scan, offline editing, PDO access, CiA 402 operation, visual topology view, and the multi-instance architecture diagram.
Editorial Conclusion
Taken as a whole, the presentation positions NexECM and NexRTOS as more than a software stack; it presents them as an integrated real-time automation foundation that unifies EtherCAT motion control, Linux determinism, AI computing, multi-master scaling, and deployable NVIDIA-based controller products. The strongest differentiators in the material are broad EtherCAT interoperability, measured real-time performance, efficient engineering tools, and a hardware roadmap aligned with emerging robotics and intelligent machine applications.

